
细说无刷直流电机如何控制?
发布时间:2022-11-17 00:00:00 浏览:1675次
高功率无刷电机必须由PWM控制,并要求微控制器提供启动和控制功能。那您了解PWM 在无刷直流电机控制中的作用吗?
当选择或开发使用脉宽调制(PWM)驱动无刷直流电机的电子设备时,运动控制系统设计人员经常会面临挑战。注意一些基本的物理现象,可以避免意外的性能问题。本文为PWM驱动器与无刷直流电机配合使用提供了通用指导。
无刷直流电机的换向
有刷直流电机使用机械换向,无刷直流电机与此不同,采用电子换向。这意味着电机的相位,根据转子相对于定子的位置依次通电和断电。对于三相无刷直流电机,驱动器由六个电子开关(通常为晶体管)组成,通常称为三相H 桥(图1)。此配置允许三个双向输出,为电机的三相通电。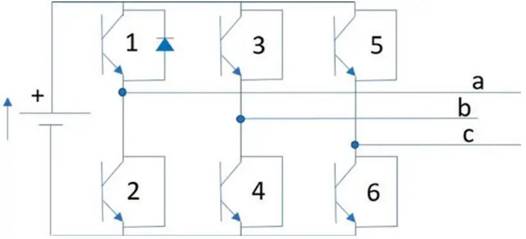

图 1 :由六个晶体管组成的三相电机 H 桥,与三个电机相位相连。
按特定顺序打开和关闭晶体管,使电机各相通电,以确保定子与转子磁铁感应所产生的磁场保持最佳方向(图2)。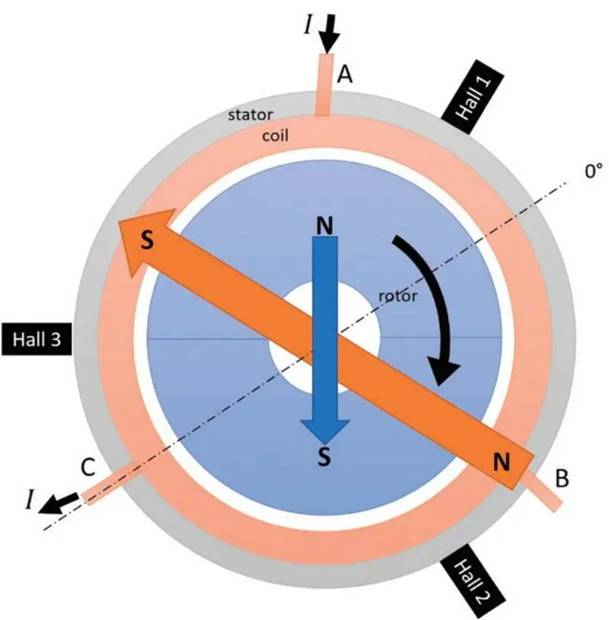

图 2 :无槽无刷直流电机的横截面示意图。蓝色 区域是带有两极永磁体的转子。磁铁产生的磁场 由蓝色箭头表示。橙色区域为三相绕组。当电流 从 A 相流向 C 相时会产生磁场,由橙色箭头表 示,以便于简化。当两个箭头对齐时,转子将旋 转。驱动器变换相位(旋转定子磁场,橙色箭头), 以确保定子和转子磁场之间尽可能保持 90 度(产 生最大扭矩)。
电机可以采用广泛使用的六步梯形换向驱动(图3),也可以通过操作实现更先进的矢量控制,也称为磁场定向控制(FOC),具体取决于电子设备的复杂程度(图4)。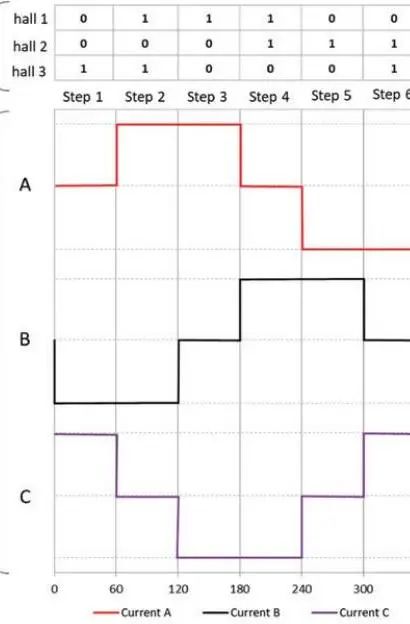
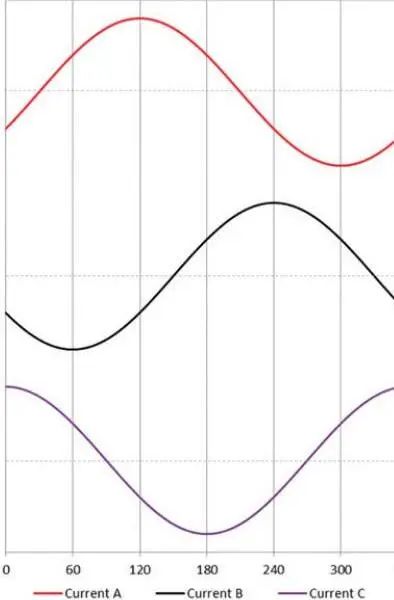

图 3 :六步换向相电流和霍尔传感器状态。

图 4 :使用 FOC 放大器的相电流。
无刷直流电机的PWM调节
在有刷或无刷直流电机中,应用的工作点(速度和扭矩)可能会有所不同。放大器的作用是改变电源电压或电流,或两者都改变,以实现期望的运动输出(图5)。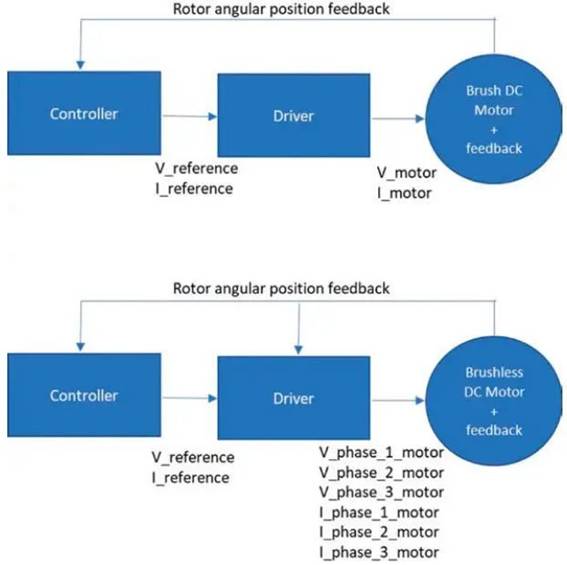

图 5:有刷直流电机和无刷直流电机之间的运动控制架构比较。
改变电压或电流通常有两种不同的方式:
·线性放大器;
·斩波器放大器。
线性放大器通过改变电压或电流,来调整传递给电机的功率。未输送至电机的功率被耗散(图6)。因此,需要一个大型散热器来耗散功率,从而增大放大器的尺寸,使其更难以集成到应用中。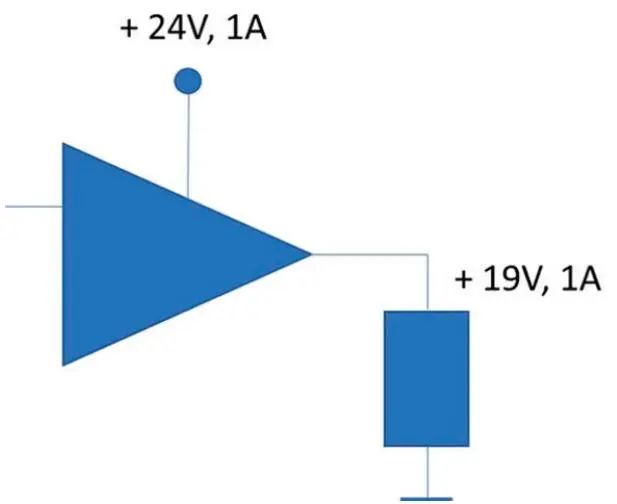

图 6 :为电机供电的线性放大器示例。
斩波放大器通过打开和关闭功率晶体管来调节电压(和电流)。它的主要优点是在晶体管关闭时可以节省电源。这有助于节省应用的电池寿命,减少电子设备产生的热量,并允许使用尺寸更小的电子设备。大多数情况下,斩波放大器都使用PWM 方法。
PWM 方法包括在固定频率下改变占空比(图7),以将电压或电流调整到期望的目标值内。请注意,与其它方法相比,PWM 斩波电流的一个优点是开关频率是一个固定参数。这使得电子设计师更容易过滤电磁噪声。当PWM 晶体管占空比为100% 时,施加到电机上的电压为母线电压。当晶体管占空比为50% 时,施加在电机上的平均电压为母线电压的一半。当晶体管占空比为0% 时,不会向电机施加电压。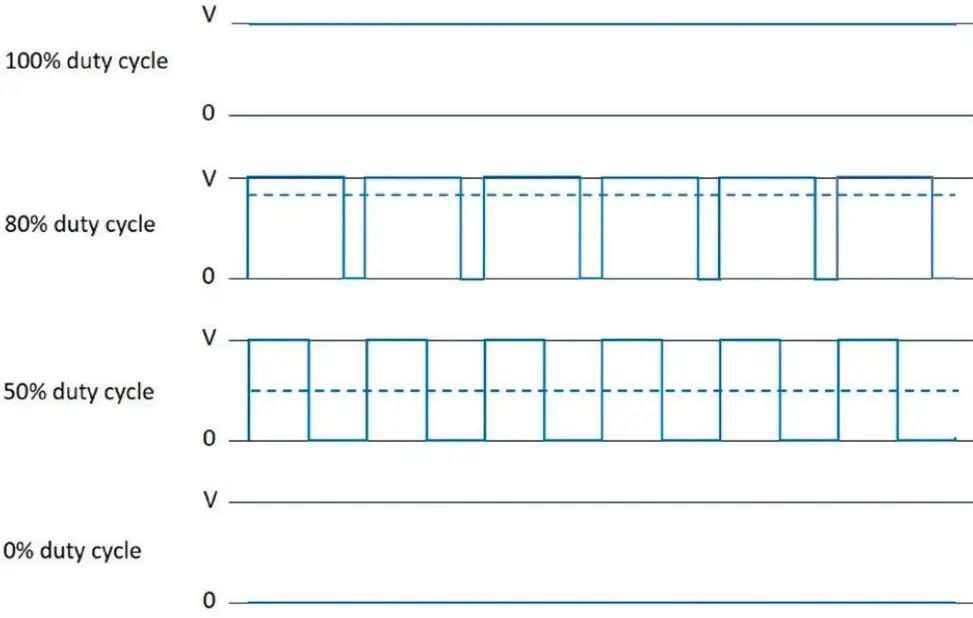

图 7 :不同的 PWM 占空比。所有工况下的频率都是相同的,而平均电压(虚线)与占空比成比例。
无刷直流电机的电感效应
直流电机的特点是电感L、电阻R 和反电动势E 串联。反电动势是由磁感应(法拉第- 楞次感应定律)产生的电压,它与施加的电压相反,并且与电机速度成正比。图8 显示了PWM 接通和PWM 断开时的电机。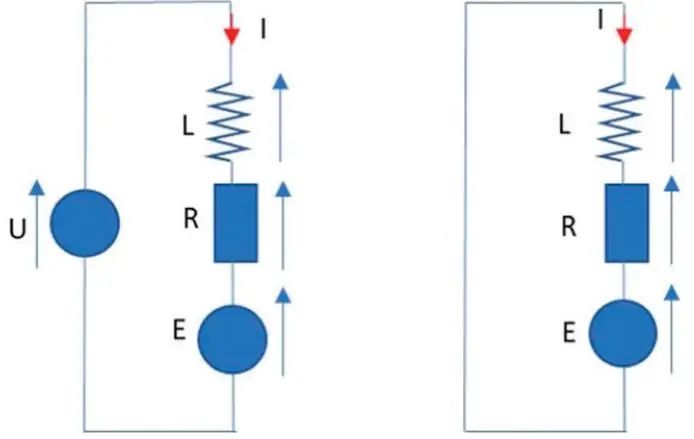

图 8:PWM 接通(左)和断开(右)时,直流电机的简化等效 电路图。为简单起见,右侧电路对应于慢衰减模式(电机中 的电流再循环)。
现在,为了简单起见,我们不考虑反电动势。当向R L 电路施加电压或切断电压时,电感器将阻止电流的变化。向R L 电路施加电压U,电流将遵循一阶指数上升,其动态取决于由L / R 比决定的电时间常数τ(图9)。在经过5 倍时间常数后,它将逐渐达到稳态值,即99.7%的U/R。

图 9:RL 电路中的电流按指数规律上升。
当R L 电路放电时,将观察到相同的指数行为。实际上,无刷直流放大器具有相当高的PWM 频率,电流不容易达到稳态。该频率通常高于50 k H z,因此在每个换相步骤中,有足够的周期对电流进行适当调制。对于50k H z 的PWM 频率,关闭和打开晶体管的周期时间等于20μs。考虑到六步换向,一个以40000 r p m(667H z)运行的单极对电机的一次换向时间,需要250μs。这样,在一步换向期间,至少有250/20=12.5 个PWM 周期。
无刷直流电机的电气时间常数τ 为几百微秒。因此,在每个PWM 周期内,电流将有时间作出反应。但是,机械时间常数在几毫秒范围内,因此机械时间常数和电气时间常数之间的系数为10。因此,当电压以典型PWM频率切换时,电机转子本身没有足够的时间响应。几千Hz 的低PWM 频率可能会导致转子振动和可听见的噪音。建议使用高于可听频率的频谱,即至少高于20 kHz。
无刷直流电机PWM 的限制
PWM 将导致每个周期的电流上升和下降。电流最小值和最大值之间的变化称为电流纹波。高电流纹波可能会导致问题。建议将其保持在尽可能低的水平。电机转矩需要考虑平均电流。平均电流取决于占空比,与电流纹波无关。
与有刷直流电机不同,无刷直流电机没有电刷。高电流纹波对寿命本身没有影响。电流波动会对电机损耗产生很大影响,产生不必要的热量。电流纹波将产生两类损耗:
焦耳损耗。电流纹波将增加均方根(R M S)电流值,这是焦耳损耗计算中考虑的。纹波将产生额外的热量,但不会增加平均电流,因此不会增加扭矩。请注意,它是RMS 电流函数变化的平方。
铁损耗。根据法拉第电磁感应定律,导电材料中磁场的变化将产生电压,然后产生被称为涡流的电流回路。铁损耗与电机速度的平方和电机电流的平方成正比。根据实际测量,当电流纹波较大时,产生的额外铁损耗会显著增加。因此,保持电流纹波尽可能低非常重要。
最小化电流纹波的建议
我们可以制定一些建议,以尽量减纹波:
降低或调整电源电压。电流纹波与电源电压成比例。高电压,有助于到达需要高速或更高功率的极端工作点。然而,如果应用不需要高速或高功率,则较低的电源电压将有利于降低电流纹波。在相同负载点下,以较低电压运行也会增加占空比,这将进一步降低电流纹波。务必将PWM 的占空比尽可能保持在50% 以内,这是最坏的情况。
增加PWM 频率。频率越高,PWM 的周期越短;因此,电流上升的时间更短。建议无刷直流电机的PWM 频率不低于50 kHz。80 kHz 或更高的PWM 频率,更适合于电气时间常数非常小的电机。
增加电感。无刷直流电机的电感值非常小。增加外部电感是一个好主意,因为它们可以减缓电流的上升和下降,从而减少电流纹波。此外,针对1 k H z 的PWM频率给出了指定的电感值。由于电机电感随PWM 频率变化,在50 kH z 的典型PWM 频率下,电感可能会降低至规定值的70%。
通常通过实验确定电感的最佳值。需要增加额外的电感,如图10 所示。虽然这种解决方案可以解决当前的纹波问题,但集成附加电感可能并不容易,尤其是在空间有限的情况下。因此,首先探索其它两种方案通常是明智选择。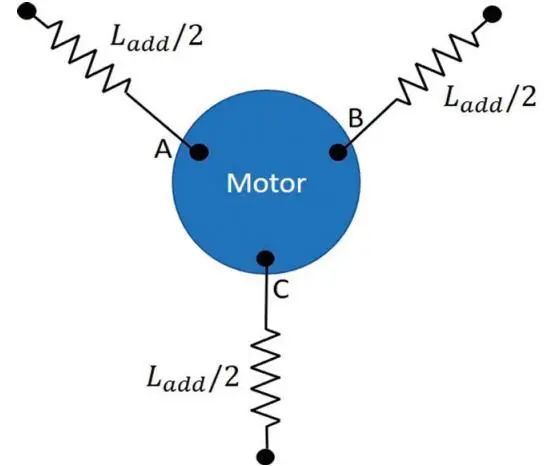

图 10 :带有额外线路电感的无刷电机。
PWM 具有许多优点,是无刷直流电机中应用最广泛的解决方案。设置适当的PWM 电压,使用较高的PWM 频率,将有助于减少纹波,并可以避免使用额外的电感。得益于现在电子元件较低的成本,使得采用高PWM 频率成为一种简单的解决方案。
当涉及电子设备的尺寸和重量时(例如嵌入式电子设备的便携式设备),或者当电池寿命是一个关键指标时(额外电感内阻的焦耳损耗所消耗的额外能量),电气设计师在开发运动控制系统时应考虑这些参数。
关键概念:
■ 审查无刷直流电机的PWM调节。
■ 了解无刷直流电机PWM的限制。
思考一下:
您是否正在解决选择或开发使用PWM驱动无刷直流电机的电子设备所面临的挑战?
- 上一篇:如何提高个人扩音产品 (PSAP) 的性能和效率
- 下一篇:关于开环闭环D类放大器

关注矽源特公众号
矽源特微信客服
 发送邮件
发送邮件 商务QQ客服
商务QQ客服 13823761625
13823761625
